

基于FMCW雷达水位计的水位测量排除干扰的方法研究
添加时间:2022-08-02 08:54:06}
1.概况
雷达水位计是一种采用雷达技术实现水位测量的水文仪器,测量时不受温度梯度、水流流速的影响,具有完全非接触的特点,同时在精度上高于机械式或压力式水位计,在不方便建造水位井及需要高精度数据的环境中有着很强的应用需求。
目前市面上的平面雷达波水位计和脉冲雷达水位计都是单发单收天线,在雷达天线波束宽度范围内的只能测量被测物体的距离,不能区分被测物体是否是水面,当有其他物体进入雷达测量范围内,会影响测量结果,并且当安装高度较高时,雷达测量范围会变大,测量范围内更加容易出现干扰物体。此外,当雷达水位计安装在岸边时,水位下降较大,露出河床,此种情况下不能区分河床与水面,容易出现测量误差。针对上述问题,本文提出了一种区分水面与其他干扰物体的方法,能够有效解决漂浮物、船只和河床等干扰物对水位测量的影响,并制作工程样机进行了实验室测试。
2.FMCW雷达测距原理
在FMCW雷达测距系统中,FMCW雷达系统发射线性调频脉冲信号,并捕捉其发射路径中的物体反射的信号,该线性调频脉冲由发射天线(TX天线)发射,物体对该线性调频脉冲的反射生成一个由接收天线(RX天线)捕捉的反射线性调频脉冲,TX信号和RX信号进入混频器(混频器是一个电子组件,将两个信号合并到一起生成一个具有新频率的新信号),由此产生的产生中频(IF)信号与距离成正比,进而可以计算得到被测物体的距离。
混频器的运行方式还可以用图形方式来表示,通过时间函数的TX和RX线性调频脉冲频率表示法加理解,如下图所示。
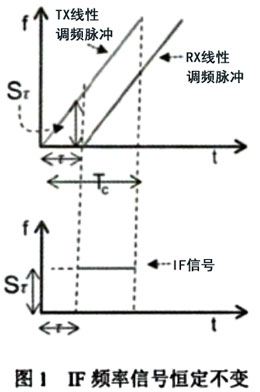
上图是针对检测到的单个物体的TX和RX线性调频脉冲作为时间的函数。注意,该RX线性调频脉冲是TX线性调频脉冲延时τ后被雷达接收,Sr是延时r对应的频率。通过测量F信号的频率可以计算被测物体距离,测量距离可以用下式表示:
d=cf0Tc/2B (1)
其中d是与被检测物体的距离,c是光速,f0是IF信号的频率。
上述分析均假设雷达仅检测到一个物体,而实际测量过程中会遇到干扰物,因此会检测到若干个物体。
假设在一次测量中检测到三个被测物体,雷达会接收来自不同物体的三个不同的RK线性调频脉冲,每个脉冲的延时都不一样,延时和该物体的距离成正比。不同的RX线性调频脉冲转化为多个IF单音信号每个信号频率恒定,如下图所示。
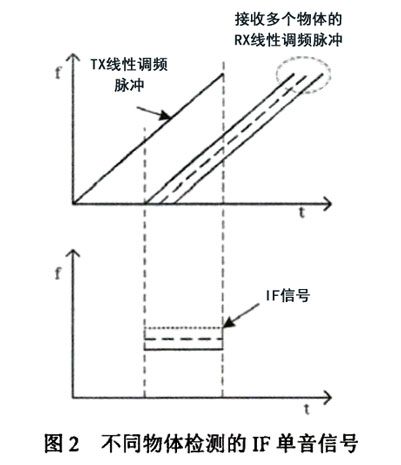
通过公式(1)可以计算每个被测物体的距离。
3.算法设计
由FMCW雷达测距原理可知,雷达水位计的测量范围有多个物体时,也就是有干扰物体进入到测量范围内的时候,雷达水位计将无法区分水面与干扰物体。一般雷达水位计采取的方法是选取反射信号强度zui大的信号或是距离zui近的信号进行距离计算,这样计算得到的水位会存在误差。因此,本文提出一种能够区分水面与其他干扰物体的方法,可以有效的解决干扰物体进入雷达测量范围内所带来的误差。
本文采用的是77GHz雷达,zui大连续扫频带宽为4GHz,使用快速傅里叶变换对F信号进行处理,其分辨率可以达到3.75cm,也就是说区分两个物体的zui小距离是3.75cm。使用快速傅里叶变换对雷达测量范围内的被测物体进行初步检测,判断被测物体的数量,假设被测物体数量为1,则对测量距离的精度进行进一步提高。假设被测物体数量大于1,则需要对被测物体是否是水面进行判断,之后对测量距离的精度进行提高。
本文提出的区分水面与其他物体的方法主要从以下三个方面进行:
1)反射率的差异,一般来说,水面的反射率会比其他物体高;
2)是否运动,一般水面不是静止的,会有波动,而干扰测量的物体大多是固体,表面是不存在波动;
3)运动的周期性,水面的波动具有一定的周期性。
**对F信号进行分析,设F信号进行快速傅里叶变换得到的频谱为X[n],n为频谱的点数,频谱中会存在一个或多个峰值,每一个峰值都代表着一个F单音信号,设其中一个峰值对应的索引值为k,对应的X[k]的复数表示为a+bi,则峰值的幅值Va可表示为:
Va=√a²+b² (2)
个测量周期内进行32次测量,测量值分别为:
Va1,Va2,Va3,...,Va32 (3)
找到上述测量值中的zui大值Vamax为:
Vamax =MAX(Va1, Va2, Va3,...Va32) (4)
接下来对是否运动进行分析,Va的相位通过带通滤波器以捕获相位变化,并计算此相位变化在一个周期内的功率总和,将其定义为W,设%的相位为P,则有:
P=tan(a,b) (5)
相位差Pi可表示为:
Pi=P-Pr (6)
式中Pr为上一个测量的相位。
相位变化的值进行带通滤波得到滤波值OFP为,
OFP=(b0+b1*px-1+b2*px-²)/(a0+a1*px-1+a2px-²) (7)
式中a0,a1,a2,b0,b12,b2为二阶滤波器的系数,其决定滤波器的频率响应以及增益。
由OFP可以得出W:
W=∑i³²=1 OFPi (8)
式中OPFi为一个周期内第个滤波值OFP。
zui后对运动的周期性进行分析,对一个周期内的32个滤波值OFP进行傅里叶变换,变换得到的峰值为OCM。
将上述的Vamax、W、OCM三个值通过加权的方式求和得到区分水面还是其他物体的指标Q,则Q为:
Q=a1 X Vamax +a2 xW+a3 x OCM (9)
式中a1,a2,a3为加权系数,该系数实在实验条件下给定的。判断当Q的变动超过阈值范围时则认为被测量物是水面。
4.实验测试
根据本文提出的方法,使用DSP进行算法仿真和测试,设计开发算法软件,在此基础上研制了雷达水位计样机,并进行了初步测试
4.1实验测试
将测试使用的雷达水位计样机安装固定在1.5m高的地方,正下方依次放置装了水的容器和装了沙土的容器,分别模拟河流水面和干扰物的表面,对它们进行Q值测量并进行了记录,数据对比分析如下图所示。
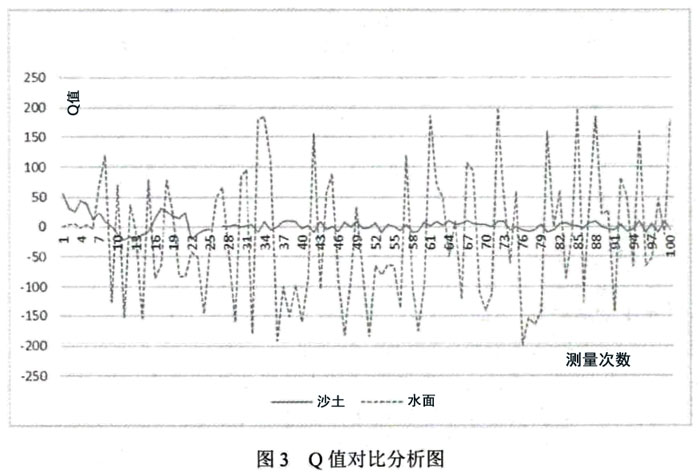
分析得出,装水的容器比装沙土的容器的Q值变化幅度要大很多,证明了上述算法的可行性。经过多次实验,放置不同材质的干扰物,每种材质的干扰物进行反复测试,初步确定区分水面与其他物体的阈值为100,当Q值的变化幅度在士100以内则认为被测量物体不是水面,Q值的变化幅度超过土100则认为被测量物体是水面。
4.2实验测试二
将测试使用的雷达水位计样机安装固定在距离水面5米的支架上,在雷达水位计的测量范围内放置干扰物体A和干扰物体B,测量示意图如下图所示。
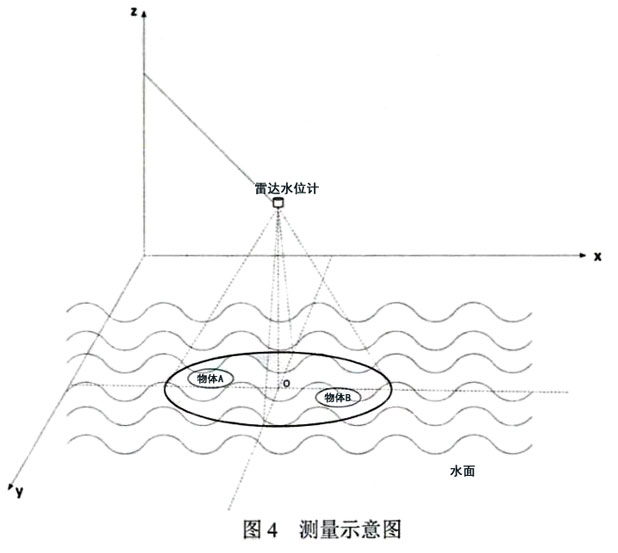
物体A和物体B分别选取不同材质的于扰物进行3组实验,物体A高出水面10公分,物体B高出水面15公分,实验1的材料为木板和沙土、实验2的材料为水泥和塑料、实验3的材料为金属材料和橡胶每组使用雷达水位计测量10次,测量数据如下表所示。

通过对不同材质的干扰物进行测试表明,测量距离除了雷达水位计系统微小的波动外,不会受到干扰物的影响,测量结果相对稳定。
5.结论
本文通过深入研究FMCW雷达测距原理,详细叙述了干扰物如何对水位测量的产生影响,提出了在快速傅里叶变换的基础上,根据水面的特性加以区分水面与干扰物的方法,进而减少水位测量的误差,提高水位测量的准确度。实验结果表明该方法能够有效减少外界干扰物对水位测量的影响,但是野外测量环境比实验室环境要差很多,不稳定因素更加多,未来还需要进行大量的野外测试,进一步提高系统的稳定性和适应性。

