

基于K波段的雷达水位计设计
添加时间:2022-08-02 08:51:33}
多年前,国内水位测量大多以传统接触式机械水位计为主,存在安装维修困难、操作不便、测量精度低等缺陷。随着水利信息自动化过程的到来,近几年,电子式水位计正逐步替换掉老旧的机械式水位计。当今,国内**应用的是超声波式水位计,激光式水位计,多极板电容式水位计等,但上述水位计受液面环境影响大适用性不大。而雷达水位计从原理上避免了超声波式、激光式等非接触式水位计受各种环境因素干扰以及传统接触式机械水位计易磨损老化的弊端,可以在产品上做到高可靠性、高稳定性、低功耗,具有更好的技术可行性和实用性。由于无接触性设计,K波段雷达水位计不受水质影响,可以在重污染场所或者强腐蚀性等特殊环境下使用;测量程序中每秒多次独立测量的波动补偿可以去除浪抖;雷达波传播不受风、温度、湿度,雷达波反射不受液面环境影响,适用于生长水草或者漂浮物的河面;小型化通用设计,配合万向悬挂架,在不平整的地方也可方便安装。而高频电磁波易受到雨滴干扰,大雨天时测量准确度降低;总体造价较高。
1、工作原理
K波段雷达水位计采用雷达测距效应,用无接触的方法测量水面高度。雷达波以光速发射并反弹再被接收,其差时可以通过电子部件测量并被转换为水位信号。通过一种特殊的时间延伸方法可以确保极短时间内稳定和精确的测量。再利用水位遥测终端,将雷达信号采集,传输,完成对水位的测量。
由信号激励系统产生22~26GHz的经三角波线性调制信号调制后的高频振荡载波信号,经定向耦合、放大等电路送至天线端进行发射。发射出去的信号在遇到障碍物时返回,形成天馈系统的回波输入。接收单元电路在通过一系列预处理后,与发射系统定向耦合过来的信号进行两级或多级差拍,差拍后的信号就包含有目标的距离信息。
在不考虑其他因素条件下,测目标距离为R,光速已知,则雷达接收到的回波信号在时间上与本振信号相比将有t=2R/C的时间延迟,将回波信号与发射信号相干混频得到的拍频信号即为延迟时间内信号频率的变化。
R=(cTm/4B)fb (1)
式中:R为目标距离;c为光速;Tm为调制周期;B为频偏量;fb为平均差频。
2、硬件结构设计
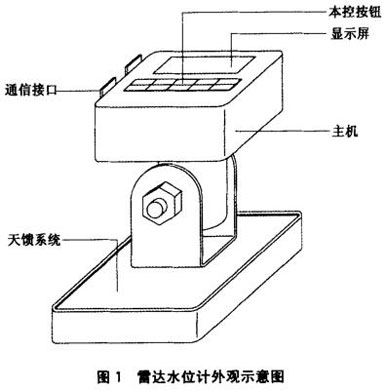
K波段雷达水位计采用小型化设计,主要由激励信号系统,天馈系统,信号处理系统,电源部分,外观示意图如图1所示。
2.1激励信号系统
雷达激励信号系统由高频时钟、DDS、滤波电路、倍频电路、调幅电路等组成。在高频时钟产生的时钟信号激励下,由DDS内部波形储存器的数据决定波形与频率,产生波,再经过滤波电路、倍频电路、调幅电路等得到雷达所需线性调频连续高频波,zui后作为目标回波信号和雷达系统的本振系统分别输出给天馈系统和接收电路。
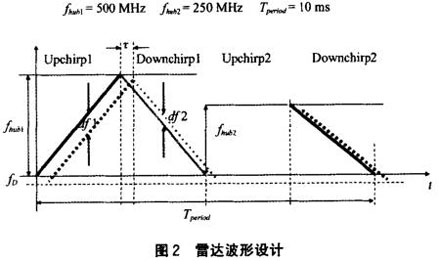
DDS由于模块化设计结构,输出波形由波形储存器中的数据决定,DDS可以直接输出正弦波,方波,三角波,锯齿波等波形。三角波波形简单,波峰明显,结果精确,抗噪声性能好,所以雷达波形设计采用两级不同步进斜率的三角波,波形设计如图2所示。
在高频雷达系统中,信号的频率与测量精度相关,根据技术指标要求0~20m的水位计精度必须在士10mm内。因为频率计数只能读出整数值,而不能读出分数值,用线性连续调颊波雷达测距的结果是离散的,表达式为:
R=k1(c/8B)=K1△R (2)
△R=c/8B (3)
式中:k1为离散频率差值;c为光速;B为频偏量。
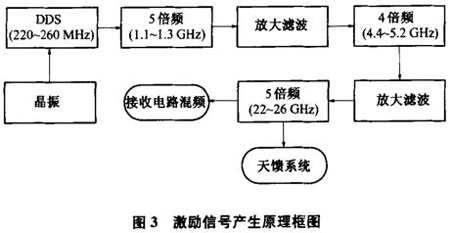
当固定误差△R在士10mm内,频偏量B要大于3.75GHz,则雷达的工作频率应当大于20GHz,在此设计中,我们选取中心工作频率为24GHz,频偏量为4GHz,22~26GH的信号。这个频率为K波段(18~27GHz)雷达波。由DDS产生220~260MHz激励信号,经过两次5倍频和一次4倍频和若干放大滤波电路之后产生,zui终得到22~26GHz信号。如图3所示。
2.2天馈系统
天馈系统由一个平面天线和小型环形器组成。平面天线为收发分用式,由激励信号系统产生的高频发射信号通过环形器进人平面天线,再由平面天线发射出去,遇到目标,形成回波,再次进入平面天线,并通过环形器进人接收电路里。面天线采用标准增益平面,口径控制在20cm内,厚度为2cm以内,增益为6dBm,雷达波波束宽±2°。环形器隔离度为20dB。由于发射功率为0,假设近距离全反射,不至于烧毁接收机电路,发射面较远时,发射信号进过20dB隔离后的泄露到接收通道时已经衰减为-20dBm以下,也不足以干扰接收机的正常工作。
2.3信号处理系统
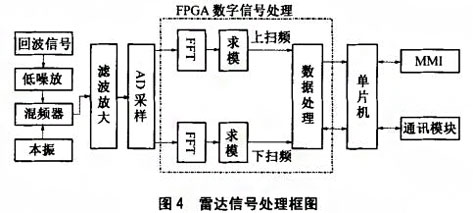
差频信号进过A/D采样后,再进入FPGA芯片进行FFT(快速傳里叶变换)及后期处理,由于DDS变频是阶跃的,因此混频后的差频信号主要包括2个频率组,通过FFT后分析出差频信号中的频率分布特性,并通过噪声拟合处理、一阶矩估计和频率积累,求模,上下扫频分别得到上差频和下差频,zui终计算出平均差频fb。再经过式(1)计算,得到水位和雷达距离R,再由雷达高h,得到水位高H=hーR。
FPGA将结果H输出给单片机,单片机可以按预定程序对接收到的H进行处理,多次计算平均值减小误差,剔除错误数据等。单片机通过储存模块,将按预先编写的程序按时段或者按水位高或者其他要求储存;通过MMI(人机交互界面)模块,操作者可以通过操作键盘将水位高H或者其他信息显示在LCD上;通过通信模块,以485总线,can总线或者usb总线的方式将信息传输到远端主控设备上。
雷达由单片机控制,实际测量方式灵活多变,比如可以根据用户需要采用定时自动测量,自动发送数据,超越警戒自动报警,警戒状态自动高密度监测,雷达状态自动回馈等形式(见图4)。
2.4电源部分
电源部分除了采用低功耗电路设计外,还采用了工作休眼双模式体制,不仅可以定时工作,也可以接到工作指令后开机,其他时间进入休眠模式,保证了雷达设备可以长期低功耗工作。具体实现方式如图5所示。
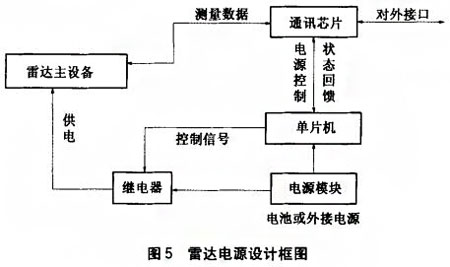
电源模块采用DC-DC设计,实际使用中可以外接电源,也可以采用内置可充电大容量锂电池供电。
考虑到该设备可能长期野外无人值守,且无需不间断测量,因此引人低功耗待机模式,通过关断雷达通信模块以外的所有电源,以达到低功耗的目的。当雷达接到远程控制信号通过通信芯片传达的“待机模式”指令后,单片机立即关断继电器,使得雷达其他电路断电,仅保留通信芯片和单片机部分的
正常工作。通过计算,该模式下的工作电流预计低于0.5mA,即满足指标提出的12VDC,0.5mA的要求。
3、系统软件设计
K波段雷达水位计的软件设计主要有系统初始化、雷达波采集处理、数据传输、低功耗模式控制、数据显示、上位机通信等。系统主程序流程图如图6所示。

程序代码主要在FPGA和单片机中。其中FPGA主要负责雷达波采集和处理计算,单片机负责其他。系统上电后,进人初始化,单片机设置其看门狗定时器、时钟模式、各挖制端口寄存器。之后进入正常工作模式,单片机总控各单元。在FPGA进行回波信号压缩之后,回波信号内含地物杂波和气象杂波等信杂,且水流为动目标,先采用固定目标消除,再利用MTI(动目标显示)和MTD(动目标检测)来抑制杂波,还需进行CFAR(恒虚警处理)来使检测目标具有特定虚警概率和检测概率,zui后进行混频波处理,完成差频运算,zui后将结果输出给单片机。单片机中含MMI模块用于显示水位即时数据和本控设置;上位机通信模块用于接收上位机指令或传输数据;智能能耗控制模块控制“休眠模式”;预警模式对zui后得到的水位数据进行分析判断是否预警等。
4、调试结果与分析
雷达水位计模型与SW40浮子水位计比测试验。为检查所测数据线性度,做误差分析,其中数据都为水位计**高程和当时测量水位差值(见表1)。
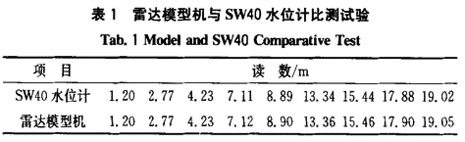
分析得出,线性度较好,在测深为0~10m时,雷达水位计的误差在士10mm内;当测深为10m时,误差变大,在土20~士30mm。随着波束角扩大,回波三角波波峰分析的模糊度变高,精度降低,误差变大。且误差并没有随机分布,总体数值偏大。
K波段雷达水位计的误差主要表现系统误差。由于系统电路内部传输信号都是电子信号,在常温常态下,电路性能稳定性和抗干扰能力较好,对误差影响zui大的是安装条件(安装角度)和雷达高频波信号分析灵敏度,安装角度通过精确调节可校准。升高精度的解决方案:①减少波束角,取决于天线特
性,可以通过实验调研选取更小波束角的天线;②提高频偏量的范围。系统仍在调试开发测试,减少误差,提高精度。
5、结语
当前国内还未研制出成熟的可用于实际生产测量的雷达水位计,当前使用的雷达水位计几乎都是国外生产制造的,价格高,维修周期长。本文设计的K波段雷达水位计,利用K波段雷达测距效应,实现了水位监测自动化。智能化程度高,监测现场无需专人值守,结构简单,体积小。经过测试调试,性能稳定,效果较理想。

